1. 堆简介#
堆本质上是一棵树结构,其每个节点的键值都大于等于或者小于等于其父节点的键值。这里主要讨论的是二叉堆。
二叉堆是一种特殊的完全二叉树。完全二叉树是指,除了最后一层外,其他各层的节点数都达到最大,并且最后一层的节点都连续集中在左侧。除了结构上的要求,堆中的节点还需要满足堆序性:
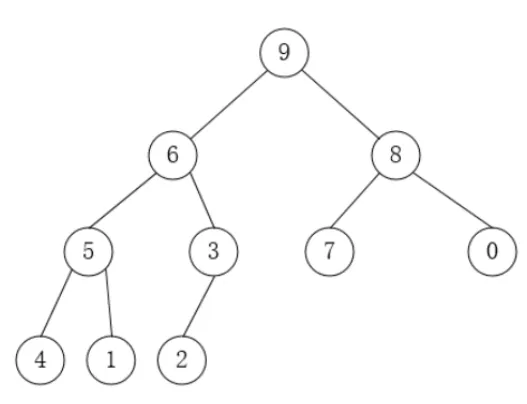
- 最大堆(Max Heap):每个节点的值都大于或等于其子节点的值。因此,堆顶(根节点)的元素是整个堆中的最大值。
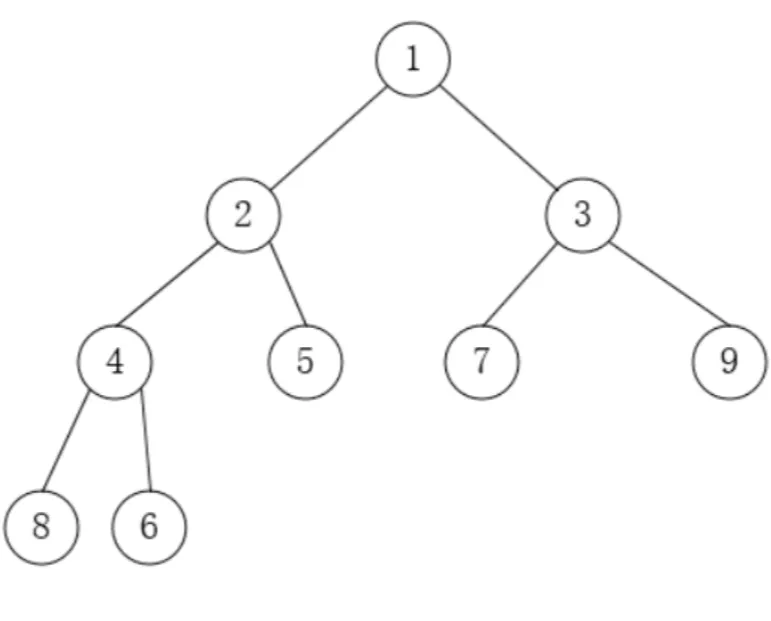
- 最小堆(Min Heap):每个节点的值都小于或等于其子节点的值。因此,堆顶(根节点)的元素是整个堆中的最小值。
最大堆:
最小堆:
2. 堆的存储#
尽管堆是树形结构,但它通常用数组来实现高效存储,堆节点在数组中的存储顺序通常是层序遍历的顺序,因此堆中的树节点和它的子节点在数组的索引是有数学关系的。对于数组中索引为 i 的节点:
- 其父节点的索引为
floor((i-1)/2) - 其左子节点的索引为
2*i + 1 - 其右子节点的索引为
2*i + 2
3. 堆的操作#
堆的操作主要有两种:插入和删除。插入和删除后都有可能不再满足堆的定义,需要重新进行调整,使其重新满足堆的特性,这个过程叫做堆化。堆化分为两种:上浮和下沉。
3.1 插入上浮#
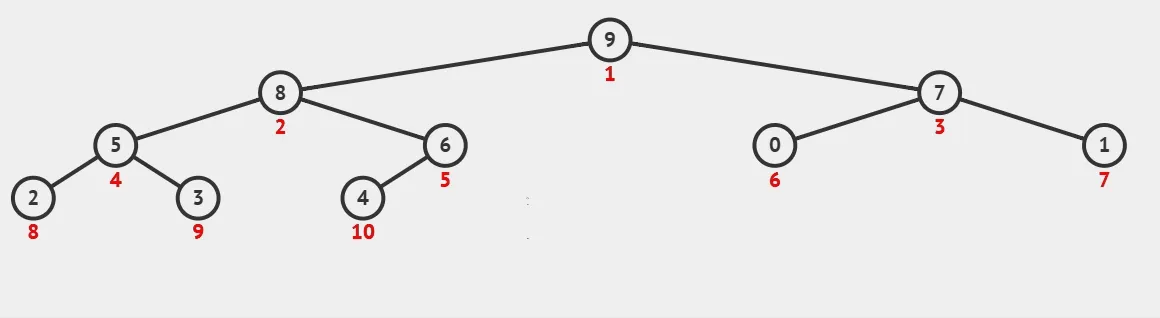
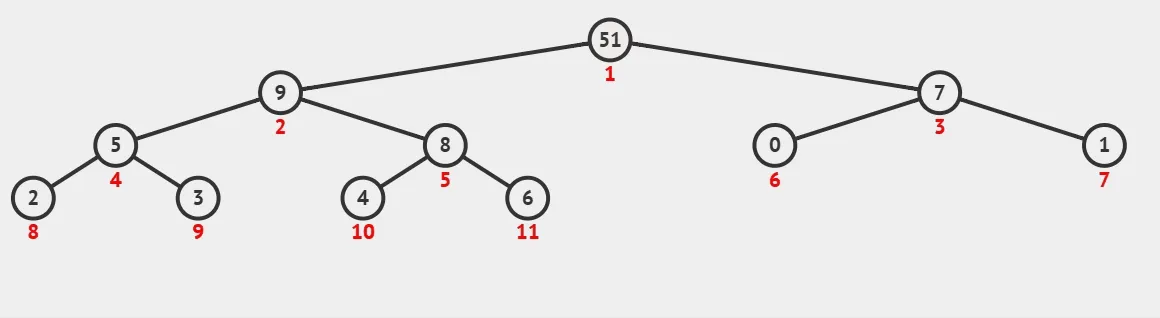
上浮主要用于插入操作中,执行插入时通常会把一个新元素添加到堆的末尾,这是它可能会比它的父节点更大(在最大堆中)或更小(在最小堆中),从而违反了堆属性。上浮操作就是将这个新元素与其父节点比较并交换,直到它找到合适的位置,恢复堆属性。以最大堆为例,插入的过程如下:
- 将新元素放在数组的末尾
- 比较新元素和它的父节点
- 如果新元素比父节点大,则交换它们
- 重复步骤 2 和 3,直到新元素不再比它的父节点大,或者它已经到达了堆顶
上浮操作的 C++ 实现如下:
void siftUp(vector<int>& heap, int idx)
{
while (idx > 0)
{
int parent = (idx - 1) / 2;
if (heap[idx] <= heap[parent]) break; // 最大堆:子 ≤ 父,则停止
swap(heap[idx], heap[parent]);
idx = parent;
}
}插入操作的 C++ 实现如下:
void insert(vector<int>& heap, int value)
{
heap.push_back(value);
siftUp(heap, heap.size() - 1);
}插入操作的动画:
3.2 删除下沉#
下沉主要用于删除操作中,执行删除操作将某个节点元素移除后,通常会用堆的最后一个元素来填补空缺。填补元素后很可能违反堆属性。下沉操作就是将这个元素与其子节点中较大者(在最大堆中)或较小者(在最小堆中)比较并交换,直到它找到合适的位置。以最大堆为例,删除的过程如下:
- 将堆的最后一个元素移动到删除位置
- 比较当前节点和它的左右子节点,找出最大的那个子节点
- 如果当前节点比它最大的子节点要小,则交换它们
- 重复步骤 2 和 3,顺着交换路径继续向下比较和交换,直到当前节点不再比它的任何子节点小,或者它已经成为一个叶子节点。
下沉操作的 C++ 实现如下:
void siftDown(vector<int>& heap, int idx)
{
int n = heap.size();
while (true)
{
int left = 2 * idx + 1;
int right = 2 * idx + 2;
int largest = idx;
if (left < n && heap[left] > heap[largest]) largest = left;
if (right < n && heap[right] > heap[largest]) largest = right;
if (largest == idx) break;
swap(heap[idx], heap[largest]);
idx = largest;
}
}弹出(删除)堆顶点的 C++ 实现如下:
int popHeap(vector<int>& heap)
{
if (heap.empty()) throw out_of_range("Heap is empty");
int top = heap[0];
heap[0] = heap.back();
heap.pop_back();
if (!heap.empty()) siftDown(heap, 0);
return top;
}弹出堆顶元素的动画:
4. 堆的构建#
从一个无序的元素集合构建一个完整堆的过程,通常被称为建堆,构建堆通常有两种方法:
- 逐个插入法
- 原地建堆法
4.1 逐个插入法#
逐个插入法的思路非常直观,首先初始化一个空的堆,然后遍历数组,将每个元素依次插入进堆里面,遍历完数组后即建堆完成。每次插入操作的时间复杂度是 O(log k),其中 k 是堆中当前的元素数量。当插入 N 个元素时,总的时间复杂度为所有插入操作的总和,即 O(log 1) + O(log 2) + … + O(log N),这最终可以近似为 O(N log N)。
C++ 实现如下:
void buildHeap(vector<int>& heap)
{
vector<int> new_heap(heap.size());
for(int val:heap)
{
insert(new_heap, val);
}
heap = new_heap;
}构建的动画如下:
4.2 原地建堆法#
原地建堆法则是构建堆的标准算法,也叫 Floyd 算法,它比逐个插入法更加高效,它是一个自底向上的方法。构建的核心思想是将每一个叶子节点视为一个堆,因此只需要处理所有的非叶子节点,确保它们满足堆的属性即可。我们需要从最后一个非叶子节点开始,向前遍历直到根节点,对每个节点执行下沉操作。
算法的具体过程如下:
- 将所有元素直接放入一个数组中,此时它只是一个完全二叉树,不一定是堆。
- 找到最后一个非叶子节点的索引。对于一个大小为 N 的数组,该索引是
floor(N / 2) - 1。 - 从这个索引开始,向前遍历到根节点(索引 0)。
- 对遍历到的每个节点,执行下沉(siftDown)操作。
时间复杂度分析:虽然这个算法看起来像是执行了 N/2 次 siftDown 操作(每次 O(log N)),因此总的时间复杂度为 O(N log N),但是这个直觉是错误的。更精确的数学分析表明,大部分节点的下沉路径都很短。越靠近底部的节点越多,但它们下沉的距离也越短。总的操作数可以被证明是一个与 N 呈线性关系的级数,因此时间复杂度为 O(N)。
C++ 实现如下:
void buildHeap(vector<int>& heap)
{
int n = heap.size();
// 最后一个非叶节点索引 = (n/2) - 1
for (int i = n / 2 - 1; i >= 0; --i)
{
siftDown(heap, i);
}
}构建动画如下:
5. 堆排序#
堆排序是借助堆结构所实现的排序算法,通常使用大顶堆来实现升序排序,小顶堆来实现降序排序。核心思想是将数组转化为大顶堆(小顶堆)后,重复从大顶堆(小顶堆)中取出数值最大(数值最小)的节点,并让剩余的堆结构继续维持大顶堆(小顶堆)的性质。以大顶堆为例,堆排序算法的步骤如下:
- 构建大顶堆:从最后一个非叶子节点开始,向前逐个对节点进行“下沉”调整,确保以该节点为根的子树满足最大堆的性质。经过一系列调整后,整个数组就变成了一个最大堆。
- 执行排序:循环地将堆顶元素(当前最大值)与堆末尾的元素交换,然后缩小堆的范围并重新调整堆,使其继续满足最大堆的性质。
- 当所有元素都从堆中移除后,数组就变成了一个有序的升序序列。
时间复杂度:堆排序的时间复杂度为 O(nlogn)。其中,建堆的过程需要 O(n) 的时间,而之后每次调整堆需要 O(logn) 的时间,共进行 n-1 次。
空间复杂度:堆排序是一种原地排序算法,它只需要一个常数级别的额外空间来存储临时变量,因此空间复杂度为 O(1)。
C++ 实现如下:
class maxHeap
{
private:
vector<int> heap;
void siftdown(int idx,int n)
{
while(true)
{
int left=2*idx+1;
int right=2*idx+2;
int largest=idx;
if(left<n && heap[left]>heap[largest]) largest=left;
if(right<n && heap[right]>heap[largest]) largest=right;
if(largest==idx) break;
swap(heap[idx],heap[largest]);
idx=largest;
}
}
public:
void buildMaxHeap(const vector<int>& arr)
{
heap=arr;
int n=heap.size();
for(int i=(n-2)/2;i>=0;i--)
{
siftdown(i,n);
}
}
//堆排序
vector<int> maxHeapSort(const vector<int>& nums)
{
//建堆
buildMaxHeap(nums);
int n=heap.size();
//从最后一个元素开始
for(int i=n-1;i>0;i--)
{
//将堆顶元素放在尾部
swap(heap[0],heap[i]);
//缩小堆结构的范围并进行下沉
siftdown(0,i);
}
return heap;
}
};
class Solution
{
public:
vector<int> sort(vector<int> nums)
{
return maxHeap().maxHeapSort(nums);
}
};6. 优先队列#
6.1 简介#
优先队列是一种特殊的队列,优先队列的元素都会被赋予一个优先级,元素的出队顺序由优先级决定:高优先级的元素先于低优先级的元素出队。如果多个元素具有相同的优先级,则它们的相对顺序没有明确规定。
6.2 应用场景#
优先队列具有广泛的应用场景,包括:
- 操作系统任务调度: 操作系统需要管理多个同时运行的进程。优先队列被用来调度 CPU 时间,高优先级的进程(如系统进程)会比低优先级的用户进程先获得执行权。
- 图算法:
- Dijkstra 最短路径算法: 在寻找图中从一个顶点到所有其他顶点的最短路径时,Dijkstra 算法使用一个最小优先队列来存储待访问的顶点。队列根据已知的从源点到该顶点的距离进行排序,每次从未访问的顶点中选择距离最短的一个进行处理。
- Prim 最小生成树算法: Prim 算法使用最小优先队列来选择连接到当前生成树的、权重最小的边,从而逐步构建最小生成树。
- 事件驱动模拟 (Event-Driven Simulation): 在模拟系统中,事件被存储在一个以时间为优先级的最小优先队列中。模拟器总是从队列中取出时间最早的事件进行处理,处理该事件可能会触发新的未来事件加入队列。
- 数据压缩 (Huffman Coding): 在构建霍夫曼树时,使用一个最小优先队列来存储字符及其频率。算法重复地从队列中取出两个频率最低的节点,合并它们,然后将新生成的父节点放回队列,直到队列中只剩一个节点(即霍夫曼树的根)。
- A* 搜索算法: 这是广泛用于寻路和图遍历的算法。它使用一个优先队列来决定下一步要探索的节点,其优先级由“已付出的代价”(g-score)和“到目标的预估代价”(h-score)共同决定。
6.3 实现#
优先队列的实现方法有很多种:基于数组或链表的实现方式如下:
- 无序数组或链表: 插入操作非常简单,只需将新元素添加到数组末尾或链表头部即可,时间复杂度为 O(1)。但要查找并删除最高优先级的元素,则需要遍历整个数据结构,找到目标元素,这需要 O(n) 的时间。
- 有序数组或链表: 如果我们维持一个按优先级排序的数组或链表,那么查看和删除最高优先级的元素(位于数组或链表的一端)将非常快,仅需 O(1)。然而,为了在插入新元素时保持有序性,可能需要移动大量元素,导致插入操作的时间复杂度为 O(n)。
更加常用的且高效是基于二叉堆的实现方式:
- 插入: 将新元素添加到堆的末尾,然后通过与其父节点比较和交换,一路“上浮”到正确的位置以维持堆属性。这个过程最多移动树的高度,即 O(logn)。
- 删除: 将根节点(最高优先级元素)与最后一个元素交换,然后移除根节点。接着,新的根节点通过与子节点比较和交换,一路“下沉”到正确的位置以恢复堆属性。这个过程的时间复杂度也是 O(logn)。
6.4 C++ 中的优先队列#
在 C++ 中,<priority_queue> 是标准模板库(STL)的一个容器适配器,,用于实现优先队列。默认情况下,队列中最大的元素拥有最高的优先级。
std::priority_queue 是一个模板类,其声明格式如下:
template <
class T, // 元素类型
class Container = std::vector<T>, // 底层容器类型,必须支持随机访问迭代器
class Compare = std::less<T> // 比较函数对象,决定优先级
> class priority_queue;常用操作:
empty(): 检查队列是否为空。size(): 返回队列中的元素数量。top(): 返回队列顶部的元素(不删除它)。push(): 向队列添加一个元素。pop(): 移除队列顶部的元素。
C++ 的 priority_queue 默认使用 std::less<T> 比较器,队列中最大的元素具有最高优先级,如果要最小的元素具有最低优先级,可以传入std::greater<T>比较器。例如:
std::priority_queue<int, std::vector<int>, std::greater<int>> min_heap;如果是在优先队列中存储自定义的结构体或类时,则需要告诉 std::priority_queue 如何比较它们。有以下几种常用方法:
- 重载
<运算符。这种方法比较直接,例如:
cppstruct Task { int priority; std::string name; // 重载 < 运算符,priority 值越大,优先级越高 bool operator<(const Task& other) const { return this->priority < other.priority; } }; - 提供自定义比较函数对象。这种方法更加灵活,可以不修改类本身,例如:
cppstruct Task { int priority; std::string name; }; // 自定义比较函数对象 struct CompareTask { // 返回 true 表示 a 的优先级比 b 低 bool operator()(const Task& a, const Task& b) { return a.priority < b.priority; // 最大堆 // return a.priority > b.priority; // 若要最小堆,则反向比较 } }; - 使用 Lambda 表达式。对于局部的、一次性的比较逻辑,使用 Lambda 表达式非常方便。例如:
cppstruct Point { int x, y; int dist_from_origin() const { return x*x + y*y; } }; auto compare_points = [](const Point& a, const Point& b) { // 距离原点越近,优先级越高 (最小堆) return a.dist_from_origin() > b.dist_from_origin(); };